
省人化による生産性向上を実現しました
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)は、各種天井クレーンに後付けすることで、揚重、運搬作業の遠隔操作と自動化が可能となるシステムを開発しました。
建設業において、生産性向上と働き方改革を実現するためには、ICTを活用した施工や、生産プロセスそのものを変革することが重要です。大林組は、かねてから建設工事現場で使用される建設機械全体の自動・自律化に向けて、「バックホウ自律運転システム」や「タワークレーン自動運搬システム」などを開発してきました。
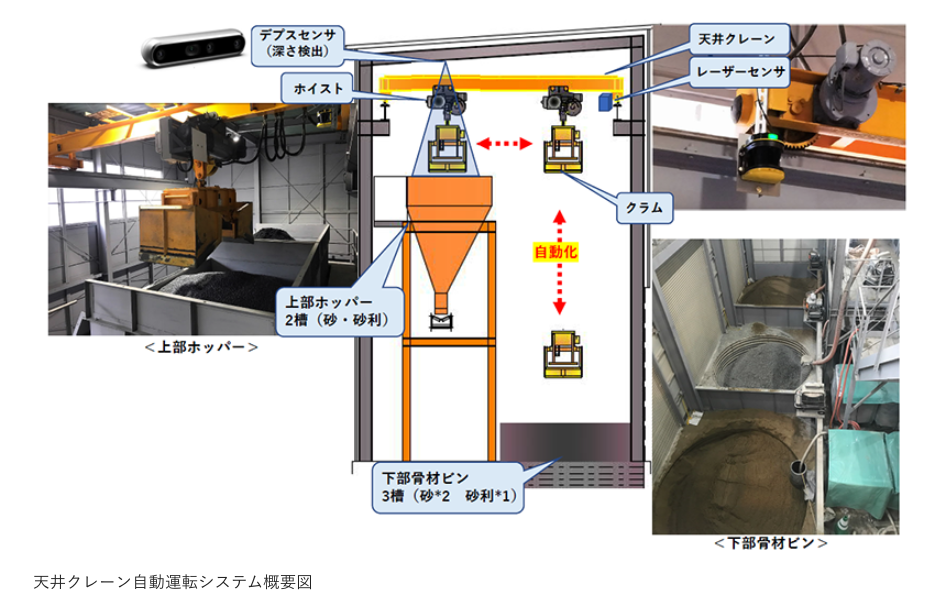
今般、新たに「天井クレーン自動運転システム」を開発し、建設現場のコンクリートプラントで複数種類の骨材(砂・砂利)を容器(ホッパー)に投入する天井クレーンに適用しました。本システムがホッパー内の骨材の残量を検出し、減少するとクレーンが自動で骨材の貯蔵場まで移動し、くみ上げてホッパーに投入します。
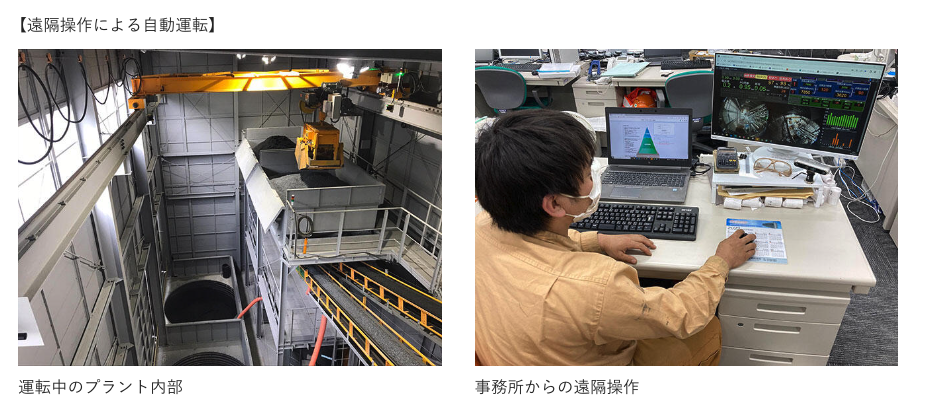
従来は、天井クレーンに備え付けられているリモコンを使用し、手動運転で骨材を投入していましたが、本システムを導入することで、手動と同様の作業を自動で再現できるとともに、遠隔操作も可能となります。そのため、従来のオペレーターとプラント管理者の2人体制から、管理者のみの1人体制に省人化することで生産性が向上し、プラントの運営コストの削減も図れます。
今後は、本システムを定点間移動の多い天井クレーンや、クラムシェル(※1)を使用した揚土作業など、コンクリートプラント以外に展開していきます。また、同様のクレーン作業を複数台で行う現場に導入することで、作業の一元管理、機械間連携を行い、省人化による生産性向上を図ります。
「天井クレーンの自動運転システム」の主な特長は以下のとおりです。
1.レーザースキャナーによる位置管理を利用した自動運転
既設の天井クレーンに後付けでレーザースキャナセンサを取付けることで、吊り具となるホイストを感知しクレーンの位置情報を把握します。目的地などの位置情報を登録することで、クレーンを自動で動かすことができ、移動中は加速・減速を自動制御することで揺れを最小限に制御します。
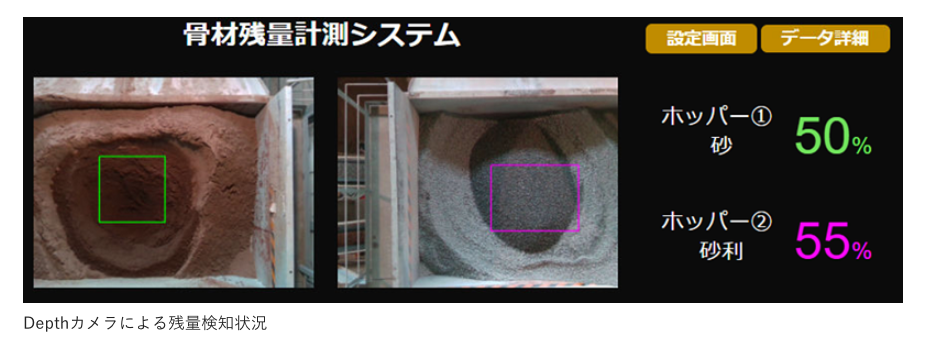
2.「Depthカメラ」による対象物の形状把握を生かした自動運転
深度計測センサにより対象物までの距離情報をカメラ映像で可視化する「Depthカメラ」を設置することで、吊り荷の形状や容量などを把握し、自動運転や障害物検知に活用できます。本システムでは、コンクリートプラントのホッパー内を撮影することで、骨材の残量を把握するとともに、減少すれば自動で貯蔵場まで移動し、くみ上げてホッパーに投入するという一連の仕組みを構築しました。
3.場所を問わない遠隔操作・監視が可能
従来は、コンクリートプラント内での作業が一般的でしたが、本システムは稼働状況を共有、確認できる環境が整えば、工事事務所の会議室や、個人のデスクなど遠隔での操作・監視が可能です。

今後、大林組は建設工事現場で使用される建設機械全体の遠隔操作や自動・自律化と、それらを統合管理するプラットフォームを構築・運用することで、省人化による生産性向上を図る建設DXを推進していきます。
※1 クラムシェル
バケットを2つ組み合わせた貝殻のような形状で、ケーブルやクレーンの先端に着けて土砂などを掴んでいく掘削機
以上
本リリースについてのお問い合わせ先
大林組 コーポレート・コミュニケーション室広報課
お問い合わせフォーム
出典:
https://www.obayashi.co.jp/news/detail/news20221005_2.html
記事の追加及び削除:
記事の追加あるいは削除を希望される場合、お手数ではございますが、以下窓口までご連絡ください。
info@symphotony.com
この情報へのアクセスはメンバーに限定されています。ログインしてください。メンバー登録は下記リンクをクリックしてください。