
I. Introduction of application scenarios
In its movement, a robot might encounter problems like steps going down on the road or hollows in the ground. Without corresponding detection and handling measures, the robot might be in the risk offalling.

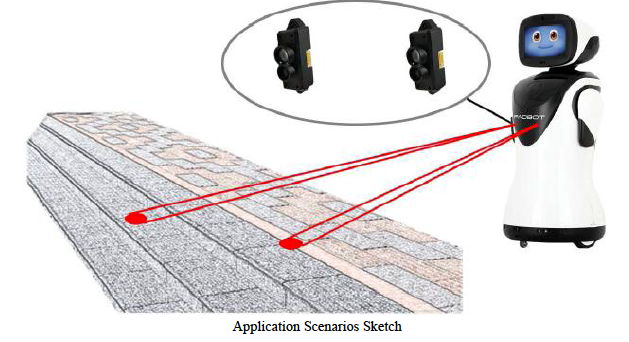
As a ranging sensor, TFmini LiDAR featuring small size and high accuracy can be used as the anti-falling sensor of robots that detects the position and distance ahead in real time and makes judgement so that the robots can make anti-falling reactions like braking, decelerating, turning.
II. Application principles
TFmini LiDAR installed on a robot measures distance at a downward oblique angle in real time when it moves. On a flat road, the distance value shall be in a certain range; however, when there are downward steps or hollows by the roadside, the distance value will go beyond the rational range and a mutation in distance will take place. Based on corresponding algorithm, data including the robot’s attitude data, speed data and installation position of the TFmini LiDAR are combined to judge whether there are downward steps or hollows ahead, so that the robot will make anti-falling actions in response.
When the road is flat, the ranging distance is between A1 and A2 and changes of distance is relatively continuous; when there are downward steps or hollows ahead, the ranging distance will see remarkable saltus and the value will grow in the same attitude (B>A, B1>A1, B2>A2), as is shown in the following figure:
この情報へのアクセスはメンバーに限定されています。ログインしてください。メンバー登録は下記リンクをクリックしてください。