
―見えない汚染を仮想空間で把握し、作業員の被ばくを低減―
【発表のポイント】
- 東京電力ホールディングス株式会社(以下、「東京電力」)福島第一原子力発電所(以下、「1F」)の廃炉作業では、被ばく低減や除染を効果的に実施するために、放射性物質による汚染の分布を正確に把握することが重要です。
- 1Fでは多くの機器やガレキが汚染しており、それらの汚染分布を正確に把握するためには汚染箇所を3次元的に特定する必要がありました。しかしサーベイメータやガンマカメラを用いた従来手法は点や面での測定であり、3次元的な汚染分布の把握は困難でした。
- 原子力機構は、こうした現場のニーズを踏まえ、放射性物質を可視化するコンプトンカメラに、サーベイメータおよびレーザ光を利用した3次元空間認識デバイスを組み合わせることにより、汚染箇所や空間線量率を見える化した3次元マップを描画するシステム(iRIS)を開発しました。
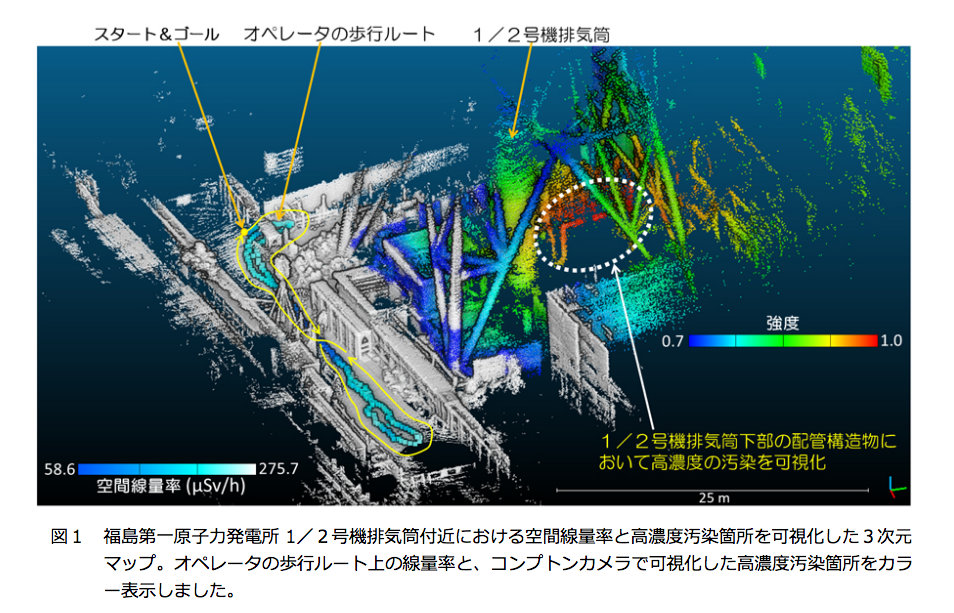
- 汚染箇所に近づくことなく5分未満のわずかな測定時間で、1Fの1/2号機排気筒付近の汚染分布や歩行ルート上の線量率分布を可視化したマップの描画を実証しました。
- 汚染分布や線量率分布を可視化した3次元マップを仮想空間に投影することにより、線量率低減のための遮へいや除染効果のシミュレーションが可能となります。今後、東京電力や関連企業による活用を目指すとともに、1F廃炉作業員の被ばく低減に貢献していきます。
【概要】
国立研究開発法人日本原子力研究開発機構(理事長 児玉敏雄、以下「原子力機構」)福島研究開発部門廃炉環境国際共同研究センター(CLADS)〔福島県双葉郡富岡町〕の佐藤優樹副主任研究員、寺阪祐太研究員らは、1F廃炉現場の3次元マップを仮想空間に描画し、任意の視点から汚染箇所の観察を可能とするシステム(以下、「iRIS」)を開発しました。
1Fサイト内には多くの機器やガレキ、建屋といった様々なものが存在しています。これらに放射性物質が付着しているため、汚染は3次元的に広がっています。そのような環境では放射線がいたるところを飛び交っているため、従来のサーベイメータのように“その点”での線量率を測定するだけでは正確な汚染の分布が把握できないという問題がありました。さらにサーベイメータを用いた点での測定では、作業現場全体の3次元測定に時間がかかるだけでなく、作業員が被ばくしてしまうという問題もありました。
原子力機構ではこのような課題を解決するために、放射性物質可視化カメラであるコンプトンカメラと3次元測域センサ(以下、「3D-LiDAR」)および線量率を計測するサーベイメータを組み合わせた統合型放射線イメージングシステム「iRIS」を開発しました。静止測定にて2次元的な汚染分布を得る従来のコンプトンカメラの利用方法と異なり、オペレータが測定対象箇所の周辺を高濃度汚染箇所に近づくことなく歩行移動しながら短時間で計測することで汚染箇所の3次元マップの描画を可能としました。本手法を1Fの1/2号機排気筒下部付近に適用した結果、高濃度汚染箇所を可視化した3次元マップの描画に成功しました(図1、図2)。また、このマップ上にはオペレータの歩行ルート上の空間線量率を併せて表示しました。この3次元マップはパソコンやタブレットを用いて任意の視点から観察することができ、ホットスポットが存在する1F廃炉現場をあらゆる方向から俯瞰的に観察できます。さらに、市販の仮想現実(VR)ゴーグルを用いることにより、仮想空間に再現した廃炉環境を汚染分布とともに体感することが可能となり、作業者の事前トレーニングにも活用できます。
また、本システムをロボットに搭載することにより、作業者の入域が困難な原子炉建屋のような高線量率エリア内部の3次元汚染分布マップを容易に取得することが可能となります。このマップは作業員の被ばく線量の低減や、除染計画の立案に役立つことが期待されます。
[研究の背景と目的]
1Fサイト内で作業する方々にとって、飛散した放射性物質による汚染の分布を把握することは、被ばく低減や除染計画の立案の観点からとても重要です。しかし、従来のサーベイメータを用いた測定は点での測定であり、汚染の分布を正確に把握できないという問題がありました。さらにサーベイメータを用いた点での測定では、広範囲エリアの測定に時間がかかるとともに、作業員が被ばくしてしまうという問題もありました。
飛散した放射性物質による汚染の分布を面的に測定するための技術として、汚染分布を可視化できるガンマカメラという放射線測定器が利用されています。しかし、従来のガンマカメラは数kgから数10kgと重いため、廃炉現場の高線量率かつ足場が悪い、狭隘な場所での測定は容易ではありませんでした。
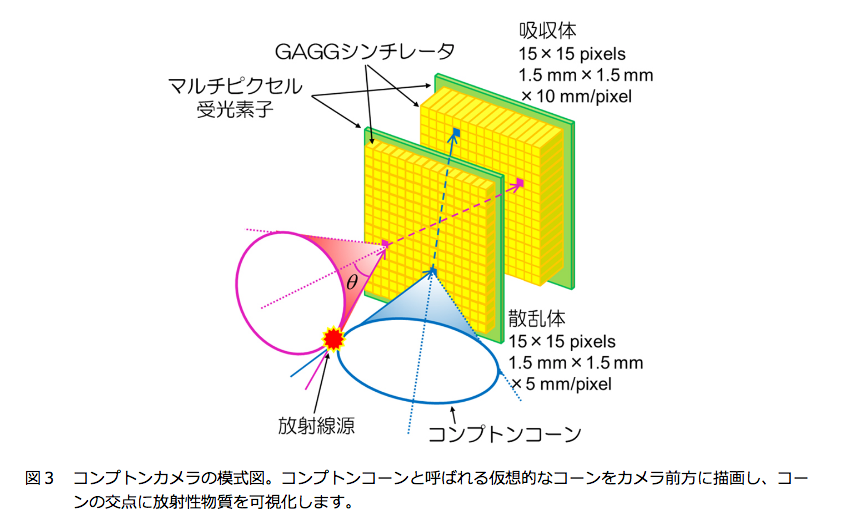
原子力機構ではこれまでに、浜松ホトニクス株式会社と早稲田大学が開発したコンプトンカメラをベースに、小型ロボットやドローンに搭載可能となるよう小型軽量化したコンプトンカメラを製作しました。(関連プレス発表:2017年9月11日、2018年8月28日、2019年5月9日)この装置を用いて従来のコンプトンカメラでは測定が困難な1F建屋内の比較的線量率が高い場所で高濃度汚染箇所の可視化試験を進めてきました。製作した小型軽量コンプトンカメラには1.5mm角の15×15ピクセルのGAGGシンチレータが2層になった放射線センサが搭載されています。入射したガンマ線(放射線の一種)が1層目(散乱体)と2層目(吸収体)の各々で相互作用した位置と、受け取ったエネルギーから、ガンマ線の飛来方向を特定できます(図3)。平成30年度には、本カメラをロボットに搭載することにより、1F1号機原子炉建屋内部の5 mSv/h以上の環境において、1F免震重要棟からの遠隔操作にて汚染箇所の可視化に成功しました。
しかしながら、コンプトンカメラでガンマ線の飛来方向を特定するためには、カメラの位置や姿勢は固定した状態で測定する必要がありました。このため、複数の測定を実施するには時間を要するだけでなく、1Fサイト内のような広範囲の汚染分布を把握するには効率が悪いものでした。また、コンプトンカメラをはじめとする従来のガンマカメラは2次元的な汚染分布を表示するものであり、機器やガレキ、複雑な構造物が存在する廃炉現場で3次元的な汚染分布を得るにはそのままでは適用できませんでした。
[研究内容と成果]
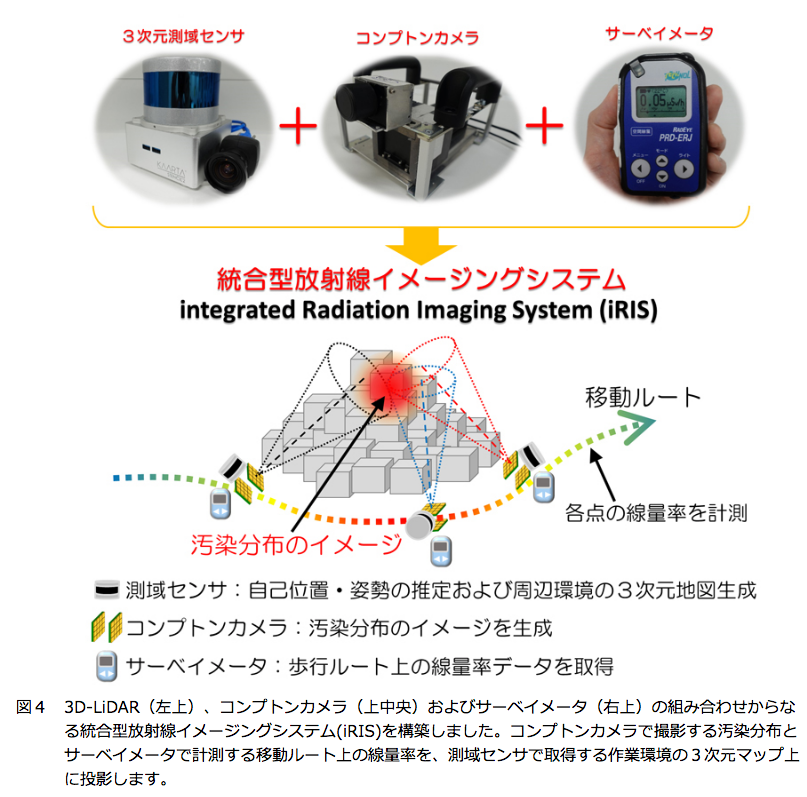
上述のような課題を解決するために、iRISでは図4に示す3つのキーデバイス、すなわち、3D-LiDAR、コンプトンカメラおよびサーベイメータを組み合わせました。iRISでは以下のことを行っています。
① 3D-LiDARを用いた自己位置推定と環境地図作成の同時実行(SLAM)により廃炉現場の3次元モデルを構築するとともに、移動中のシステムの自己位置および姿勢の情報を逐一記録
② これらの情報を、コンプトンカメラを用いて各位置で取得した放射線飛来方向の情報に同期
→ 移動しながら取得したデータによる3次元的な汚染の可視化がはじめて実現可能に
③ サーベイメータを用いることで、歩行ルート上の線量率を逐一記録可能
④ ①~③のような複数のセンサ情報を入力ファイルとし、数回のボタン操作で3次元汚染マップを描画できる専用ソフトウェア(COMRIS)を新たに開発
このソフトウェアを用いることにより、図1に示すように線量率、高濃度汚染箇所をカラーコンター図でPC上の仮想空間に表示できるようになりました。
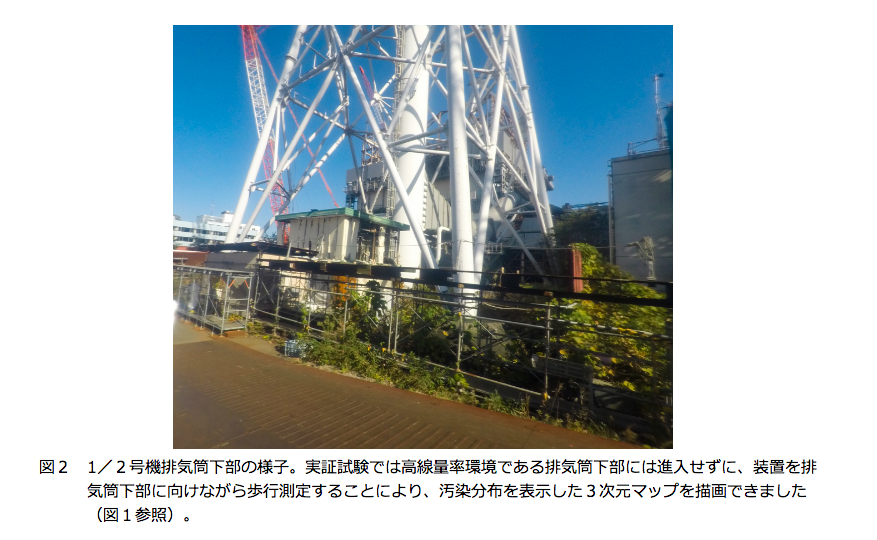
実証試験は、令和2年11月に東京電力ホールディングス株式会社(以下「東京電力」)の協力により、1Fサイト内1/2号機の排気筒付近で実施しました。当該排気筒の下部は線量率が高く、作業者の長時間の滞在が難しいエリアでした。コンプトンカメラを用いた従来の定点測定では、複数点から対象を測定せねばならず、コンプトンカメラの設置や移動、測定を繰り返す必要がありました。しかし本システムを用いた測定では、排気筒下部に進入することなく比較的線量率の低い通路上を歩行することにより、遠隔にて、わずか5分未満で完了しました。この測定データをもとに、図1に示す高濃度汚染箇所を可視化した3次元マップを描画することに成功しました。図1は排気筒付近の3次元モデルに、汚染の主な原因である放射性セシウムの分布イメージを赤く投影することによって描画した3次元汚染マップです。これは移動しながらの連続測定によって、1Fに存在する高濃度汚染箇所に近づくことなく “見える化”したはじめての結果です。
今後、本システムをロボットに搭載することによって1F原子炉建屋内部のより深部の放射線分布の探索を進めていきたいと考えています。本システムを用いることにより、測定のたびにロボットを停止させる必要がなく、短時間で広範囲の汚染箇所や線量率データを収集することができるようになります。また、仮想空間に1F作業現場を汚染分布とともに再現することで、遮へい設置方法や除染による空間線量率低減の効果を、事前にシミュレーションするといった発展が見込まれます。汚染の効率的な撤去や線量率低減に貢献するために、本システムを通して建屋内に存在する汚染箇所や線量率の分布を直感的に俯瞰できる3次元マップを作業員の皆様に提供することを目指し、東京電力と協力して研究開発を継続していきます。さらに原子力機構では、当該技術の廃炉現場における利用のみならず、大規模イベント等における核物質を用いたテロ行為の監視といったセキュリティ用途への応用も見据えています。
出典:
https://www.jaea.go.jp/02/press2021/p21051403/