名古屋大学とTierIVによる、複数の3D LiDARデータセットを発表。
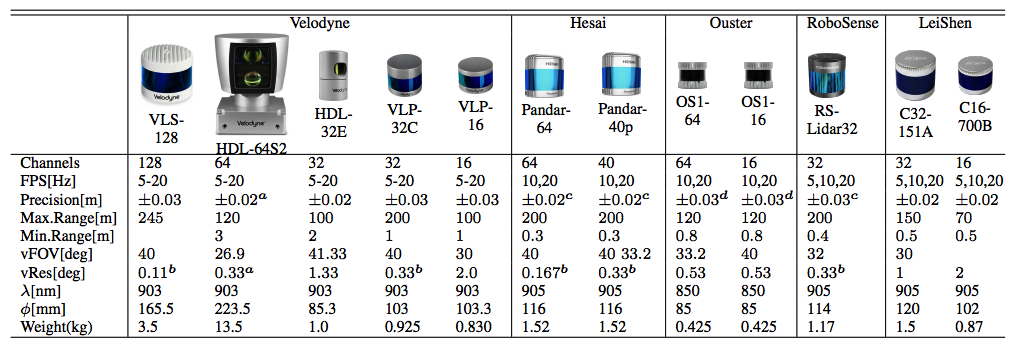
LiDARベンチマークとリファレンスは、12の異なるLiDARセンサーを特徴とし、さまざまなメーカー、モデル、レーザー構成をカバーする、この種初のデータセットです。私たちのデータセットには、さまざまな環境と構成からのLiDARデータが含まれています。既知の距離に配置され、制御された環境内の固定位置から測定された静的障害物。
LiDARがさまざまな条件(霧、雨、強い光)にさらされた気象室で捕捉された、移動中の車両から測定された静的障害物。複数のLiDARを同時に並べて固定位置からアクティブに測定し、間接干渉状態を作成する動的オブジェクト。カメラ、赤外線画像、オドメトリデバイスなどのサポートセンサーからのデータを含む、1日の異なる時間に公共の都市道路で複数回運転された車両からキャプチャされた動的な交通オブジェクト。
LIBREは、(1)現在利用可能なLiDARを公平に比較する手段を提供し、(2)開発とチューニングの観点から、既存の自動運転車とロボット関連ソフトウェアの改善を促進するために、研究コミュニティに貢献すると考えています。 LiDARベースの知覚アルゴリズム。
Webページ:https://sites.google.com/g.sp.m.is.nagoya-u.ac.jp/libre-dataset/
出典:https://arxiv.org/abs/2003.06129
データシート:https://arxiv.org/pdf/2003.06129.pdf
この情報へのアクセスはメンバーに限定されています。ログインしてください。メンバー登録は下記リンクをクリックしてください。