~自動化建設機械による月での無人による有人拠点建設の実現に向けて~
国立研究開発法人宇宙航空研究開発機構(理事長:山川宏、以下JAXA)と鹿島建設株式会社(社長:押味至一、以下鹿島)は、芝浦工業大学、電気通信大学、京都大学とともに、宇宙での拠点建設と地上での建設技術の革新を実現するために、2016年から「遠隔操作と自動制御の協調による遠隔施工システムの実現」を目指した共同研究開発を進めてきました。3年間の研究開発を経て、このほど鹿島西湘実験フィールド(神奈川県小田原市)において、月での無人による有人拠点建設をイメージした2種の自動化建設機械による実験を行い、拠点建設の実現可能性を見出すことができました。
【研究開発の背景】
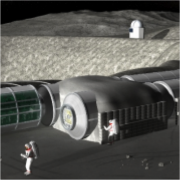
将来、月や火星に長期滞在型の有人拠点を建設するには、地球上から遠隔で建設機械を操作する無人化施工が想定されています。しかしながら、遥かに離れた場所への通信には相当の時間がかかるため、遠隔操作による作業には効率や精度の面で課題が指摘されています。一方、これまで多くの人手に頼っていた建設産業においては、将来の熟練技能者不足への対策として様々な取組みが進められており、鹿島では、建設機械の自律・自動運転を核とした次世代の建設生産システム「A4CSEL®」(クワッドアクセル)を開発し、2015年から建設現場に適用しています。そこで、宇宙での拠点建設に向けた課題解決策として、A4CSELの開発で得た自動化施工技術を導入し、遠隔操作と自動制御の協調による遠隔施工システムの実現を目指し、JAXAをはじめとした5者による共同研究開発を進めてきました。
【研究開発の概要】
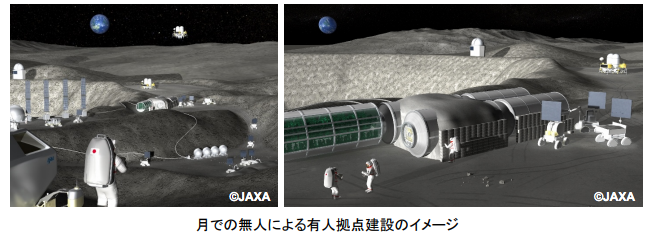
月での無人による有人拠点建設作業では、大きく4つのステップが考えられます。
①居住空間となるモジュール設置場所の整地作業
②所定の深さまでの掘削作業
③モジュールの設置作業
④モジュールを隕石や放射線から遮蔽するための覆土(土を覆い被せる)作業
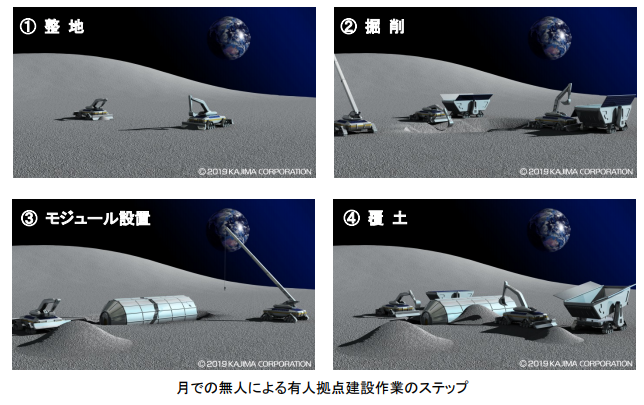
これらの作業を想定し、今回は7t 級のキャリアダンプとバックホウに自らの車体位置・方位を計測する機器や自動走行制御装置を搭載し、遠隔操作と自動運転の双方が可能な機械に改造しました。

また本研究では、本格的な自動化機能に加えて、以下の機能を開発し、遠隔操作と自動制御の協調による遠隔施工システムを実現することを目指しました。
◆通信遅延に対応した操作支援機能
3~8秒という大きな通信遅延がある場合でも、遠隔操作している建設機械の操作性や安定性を損なわず、作業計画に応じた遠隔操作を可能にする支援機能。
◆地形変化に対応した動作判断機能
通信遅延が生じ、作業中の地形変化などがリアルタイムに把握できず、遠隔操作に困難が生じた場合、現地で計測したデータを基に、状況に適合した動作を自律・自動的に判断する機能。
◆複数建機の協調作業機能
複数の建設機械への遠隔指示において干渉などの不具合があった場合、衝突回避などの応急動作を自律的に行う機能。
これらの改造を施した建設機械を用いて、繰返し・定型作業、ならびに指定された地点間の移動・走行は自動運転で、細かい調整が必要な作業は遠隔操作で行うことにより、月での無人による有人拠点建設の実現可能性を見出すことができました。
【今後の展開】
これまでの共同研究開発により、A4CSEL の自律的安全機能を採り入れた自動化建設機械による効率的な協調作業を実施できました。今回の成果をもとに、システムの機能・性能の向上を図ることでより現実的な技術を確立し、地上における革新的な建設作業を目指すとともに、宇宙での拠点建設の実現に向け、GNSS(衛星測位システム)が使えない月や火星での高精度な位置推定技術、正確な地形認識技術、不安定な通信環境下におけるシステムの安定性確保など、さらなる研究開発を進めていきます。
出典:
https://www.kajima.co.jp/news/press/201903/pdf/28c1-j.pdf