自動運転システムにおける高精度な物体検知が可能に
芝浦工業大学(東京都港区/学長 村上雅人)の伊東敏夫教授(システム理工学部機械制御システム学科)は、“確率共鳴”という現象を用い、より遠距離、広範囲にある物体を認識する新技術を開発しました。現在、自動車の自動運転技術における物体認識技術が進んでおり、歩行者などを認識するため、主に用いられるレーザーレーダー(LiDAR:light detection and ranging)が用いられています。しかし、現状では遠距離にある物に対する認識精度は低いものでした。これに、ノイズを印加し遠距離での認識精度を向上させる“確率共鳴”という現象を利用することで、物体を識別できる距離を延ばす新技術を開発しました。これは、ザリガニが外敵や水流の動きを感知する際に用いられる現象です。これにより、運転支援システムや自動運転技術のさらなる発展向上が期待されます。
背景
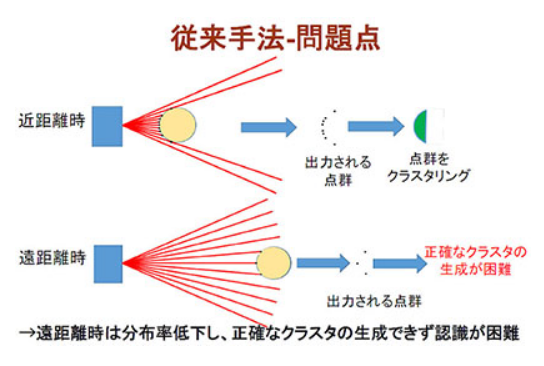
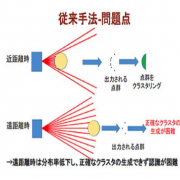
自動運転技術を発展させるにあたり、自己位置推定、外界認識、行動計画、車両制御などが大きな要素となっています。なかでも自動運転では外界認識が特に重要であり、周辺物体を認識することにより、安全な走行が可能となります。しかし、現在の自動運転技術で主に用いられているLiDARを使用した手法では、遠距離であるほど計測した点の分布率が低くなりクラスタリングが作成できませんでした。
遠距離での物体認識技術を実現
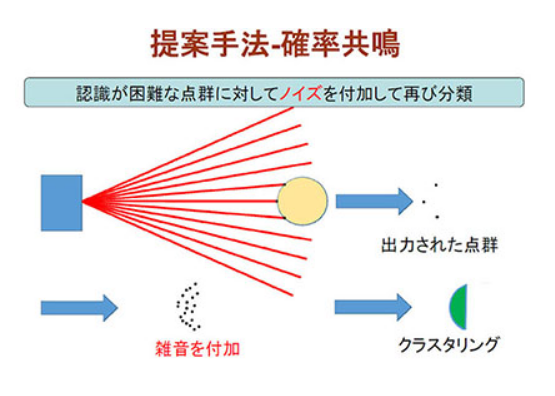
そこで伊東教授はこの課題に対し、信号にノイズを加えることで、ある確率の下で信号が強まり、検知能力が向上する現象である“確率共鳴”を用いることで、最適なノイズを発生させることにより物体を識別できる距離を延ばす技術を開発しました。これにより、LiDARの遠距離認識性能の改良や遠距離での反射点群密度の向上が可能となり、計測地点から20メートル以上80メートル以内の歩行者、二輪車、車両に対して実験を行い、認識性能の改善がみられました。
この情報へのアクセスはメンバーに限定されています。ログインしてください。メンバー登録は下記リンクをクリックしてください。