高い安全性能を備え、生産プロセスの変革を促進します
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)は、対象物の運搬ルートを自動で生成し揚重、運搬作業を実施するクレーンの自律運転システムを開発しました。各種クレーンに適用でき、遠隔からの操作も可能になり、建設業のDX(デジタルトランスフォーメーション)を促進させます。
建設業における生産性向上、働き方改革を実現するにあたっては、ICTを活用した施工や、生産プロセスそのものを変革することが重要です。大林組では、かねてから、建設工事現場で使用される建設機械全体の自律運転化に向けて、「バックホウ自律運転システム」や「タワークレーンの自動運搬システム」などを開発してきました。今般、クレーン運転において、運搬したい目的地点の位置情報を指定するだけで、AIによって最適な運搬ルートを自動生成し、その運搬ルートに沿って自律で運転する「クレーン自律運転システム」を開発しました。
じどううんクレーンが自律運転する様子を動画でご覧いただけます
事前に取得した敷地全体の点群データ(過去)に、リアルタイムな情報としてクレーンに取り付けた3D-LiDAR(※1)による点群データ(現在)、さらに完成図となるBIM/CIMデータ(未来)を組み合わせることで、クレーン周辺状況の三次元のマップ情報を時間軸で把握します。そのため、操作者が目的地点を指定するだけで、マップ情報を元にシステムが吊り荷の形状や障害物の有無から最適な運搬ルートを自動生成し、運転を開始します。加えて、運転中も点群データを取得しているため、吊り荷に障害物が接近した際には減速や停止、さらに運搬ルートを再作成するといった安全性能を保持しています。
今回開発した自律運転システムは、独立行政法人水資源機構(本社:埼玉県さいたま市、理事長:金尾健司)発注の川上ダム本体建設工事(三重県伊賀市)にて、CIMデータと連携させた「任意点間の連続自律運転」を実証しました。
クレーン自律運転システムの主な特長は以下のとおりです。
1. クレーン周辺の障害物をAIで検知し、自動で衝突を回避
クレーンに取り付けられた3D-LiDARによる点群データと、AIによる物体検知技術によって、吊り荷の形状や周辺の作業員、障害物を検知します。システムは運搬ルートと吊り荷の形状に応じた安全領域を自動で設定し、最適な速度で運転を行います。運転中に、安全領域内で作業員や養生ネットなどの障害物を把握した場合は、クレーンを減速・停止させるなど、安全性が飛躍的に向上した自律運転技術を実現しました。
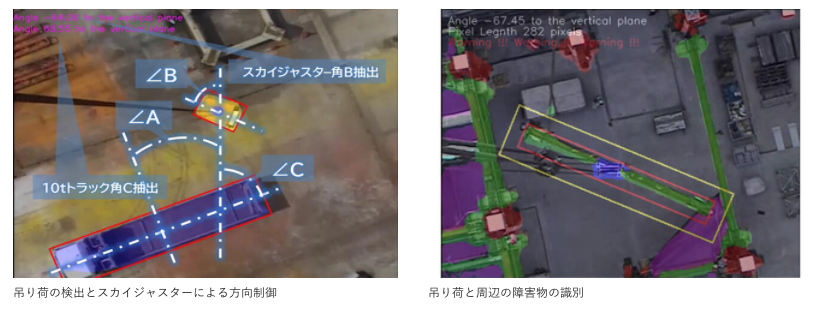
2. 資材運搬時の吊り荷の揺れ止めや荷下ろし時の方向制御、玉掛外しといった一連の作業を自動化
本システムは、運転中にシステムが吊り荷の揺れを検出すると、クレーンが自動で抑制する動作により、揺れを制御します。また、荷下ろし時は、ジャイロ効果を活用した吊り荷の方向制御装置「スカイジャスター®」を活用し、カメラ映像からのAI認識技術、GNSSによる方位計測、BIM/CIMデータを元に、吊り荷の向きを自動制御します。
吊り荷の荷下ろし後は、システムから自動玉掛け装置へ指示を送信することで、吊り荷に取り付けられていた玉掛けワイヤーを自動で外すこともできます。
これらの一連の作業を自動化したことにより、吊り荷の揺れを防ぐための人力での作業や、玉掛を外すための高所での作業などが不要になり、作業員の安全性や作業効率が大幅に向上します。
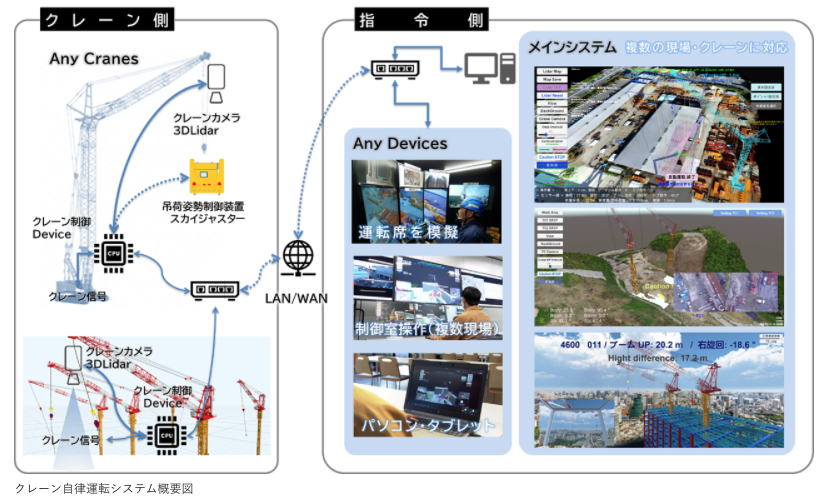
3. 遠隔から操作指示、監視が可能
オペレータはパソコンやタブレットの操作画面で作業指示を行えるため、常時クレーンを操作する必要がありません。操作するモニターは1画面に集約しており、クレーンの稼働状況を共有、確認できる環境さえ提供すれば、場所を問わず制御室や在宅での操作が可能です。

大林組は、建設工事現場で使用される建設機械全体の自律運転化と、それらを統合管理するプラットフォームシステムを構築・運用することで、生産性・安全性の向上をめざし、建設業のDXを推進していきます。
※1 3D-LiDAR(Light Detection and Ranging)
レーザー光を照射して対象物までの正確な距離を測定し、遠方や周辺の状況をリアルタイムかつ立体的な点群データとして認識するセンサー機器
出典:
https://www.obayashi.co.jp/news/detail/news20210930_2.html
「弊社関連商品のご紹介:Livox」
記事の追加及び削除:
記事の追加あるいは削除を希望される場合、お手数ではございますが、以下窓口までご連絡ください。
info@symphotony.com