・GreenValley International社:紹介ページ
・Livox社:紹介ページ
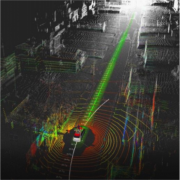
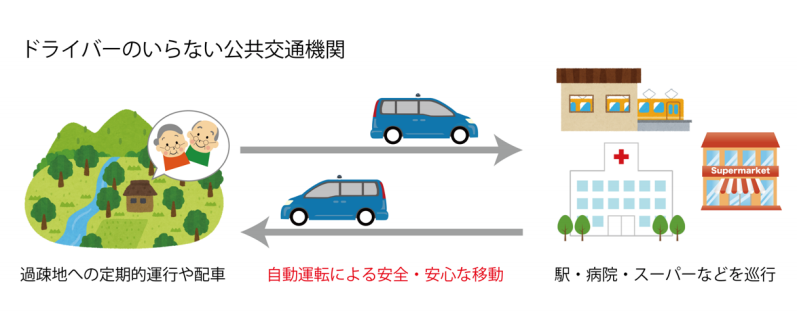
株式会社会津ラボ(本社:福島県会津若松市、代表取締役社長:久田雅之、以下会津ラボ)は、福島県の地域復興実用化開発等促進事業(平成29年度)の採択を受け、「自動運転に係る情報基盤の構築及びまちなか巡回車両の実用化に向けた実証実験 」(以下、「本実証 実 験 」という。)を行ってまいりましたが、この度、第二期にあたる平成30年度の本実証実験申請に向けて、福島トヨペット株式会社(本社:福島県郡山市、代表取締役社長:佐藤修朗、以下福島トヨペット)と協業することになりましたので、お知らせいたします。本実証実験は、平成31年度までに自動運転車両を用いた公共交通サービスの実現と関連する情報基盤の構築を目的としております。具体的には、浪江町役場を中心に浪江駅及び災害公営住宅を結ぶ2km圏において、自動運転による巡回交通サービスを実現し、当該自動運転車両で使用される各種センサ類のデータや3次元マップ等を地域情報基盤として共通利用できるシステム開発を実施します。初年度である平成29年度において、会津ラボは、①ブロックチェーンを活用したレーザーセンサ向け情報基盤の開発、②3次元マップの取得及び主要道路における自動運転実施の可否検討を進め、浪江町における当該想定道路において自動運転での車 両 運行が可能であることを実証しました。これにより第二期にあたる平成30年度においては、今般、新たに設置する会津ラボ浪江支店を拠点とし、開発したプラットフォームによる運用を開始すべく、自動運転車両の調達や保守・運用方法の確立を目指して福島トヨペットと協業 し、本実証実験の申請を行います。当該補助金交付決定後 は、公道運転実証の早 期 実現を目指して、各種許認可等の申請を関係機関と調整してまいります。学術機関や国内における自動運転実証の実績ある事業会社の協力のもと、会津ラボが有する技術開発力を活かし、過疎地域や高齢者向けの公共交通機関として自動運転による移動サービス等のソフトウェア・運行に係るノウハウを収得することにより新規事業の創出に努めてまいります。
この情報へのアクセスはメンバーに限定されています。ログインしてください。メンバー登録は下記リンクをクリックしてください。