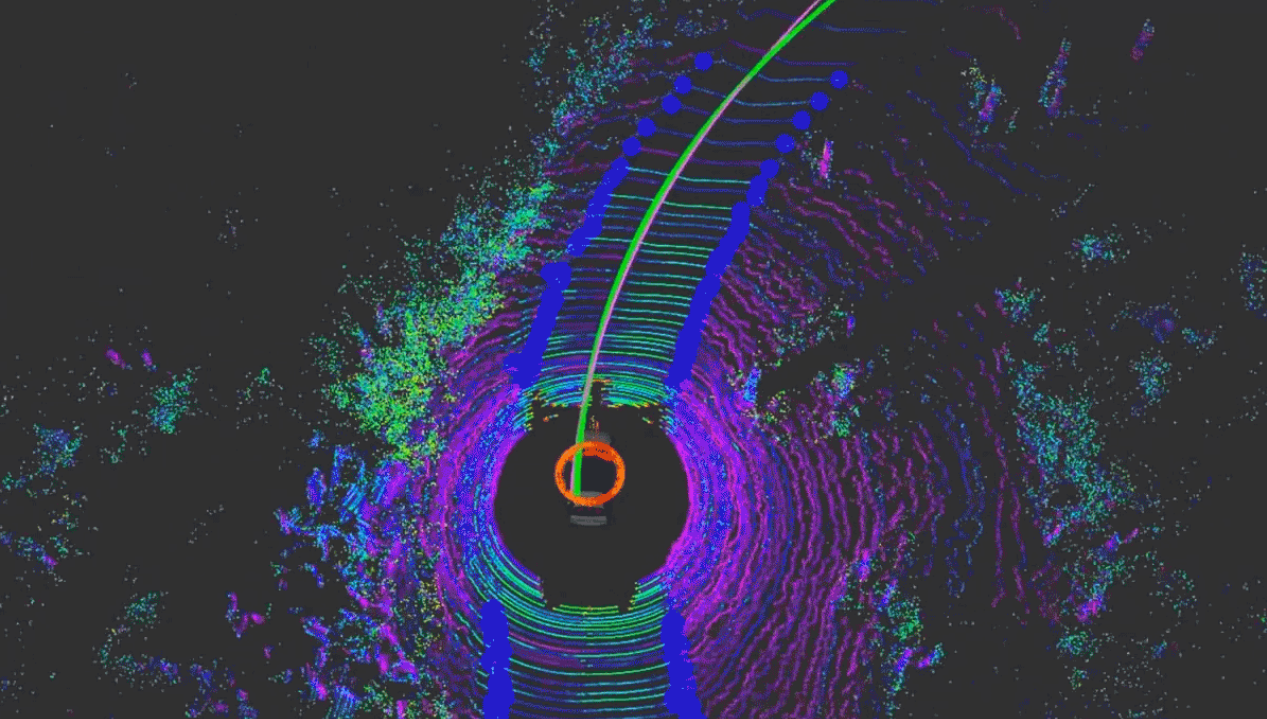
新しいソフトウェアの導入で、ロボット自動車は田舎への長時間ドライブにより上手く対処できるようになるかもしれない。
現在試験中の自律自動車は、細部まで正確に描かれた地図が用意された道路を走行しているだけだ。これには大量の記憶容量が必要で、「小都市の地図でさえ数ギガバイトにもなりがちです。地図を全国にまで拡大すると、信じられないほど高速のネット接続と大容量サーバーがいくつも必要になるでしょう」とマサチューセッツ工科大学(MIT)コンピューター科学・人工知能研究所(CSAIL)の大学院生テディ・オートは話す。
この情報へのアクセスはメンバーに限定されています。ログインしてください。メンバー登録は下記リンクをクリックしてください。