竹中工務店(社長:佐々木正人)は、自走式の墨出しロボットを建設現場に試験導入し、ローコスト化、軽量化、従来比約3倍の生産性向上を実現しました。今後、他社とのオープンイノベーションを通じて、墨出しロボットの製品化を図ります。
当社が開発した従来の墨出しロボットは、位置決めロボットの発するレーザにより墨出し地点まで逐一誘導してもらい墨出し作業を行うもので、目的地に到達する時間の観点から生産性に課題がありました。また、高機能なセンサや描画装置の搭載、測量機器の利用でロボットが高価格・大型・重量化し、作業現場への普及の障害となっていました。
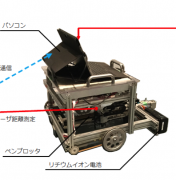
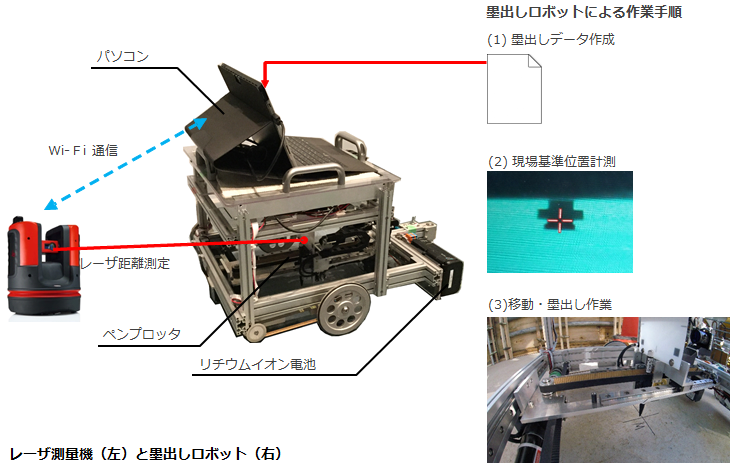
このたび改良し試験導入した墨出しロボットは、安価かつ軽量で、墨出し地点まで直接自走するロボットです。市販のレーザ測量機がレーザで墨出し地点を指定し、その情報をWi-Fi通信で受け取った墨出しロボットが目的地まで自走して墨出し作業を行います。
墨出しロボットの特長
①OAフロアの1点あたりの墨出し所要時間を従来機の98秒から33秒に短縮し、従来比約3倍の生産性向上を実現。
約4時間で100m2の墨出し作業を完了。
②職人が作業しない夜間などに、墨出しロボットを無人稼働させることで、職人が建築部材取付等の本作業に充てる時間を増やし、生産性を向上。
③自動追尾機能を持たないレーザ測量機の利用、ペンプロッタ方式の採用により、機器コストとランニングコストを低減。
④機能をしぼり、システム、機械構成を見直すことで、17kgまで小型・軽量化。
この情報へのアクセスはメンバーに限定されています。ログインしてください。メンバー登録は下記リンクをクリックしてください。